重现步骤
# K230视觉巡线模块
# 功能:检测地面路线,计算路径偏移角度和中心位置
# 输出:路径偏移角度、路径中心坐标、线段信息等
# 作者:KizAI
# 日期:2024-07-11
import image, time,math,os, sys
from media.sensor import *
from media.display import *
from media.media import *
sensor = None
# ################## 系统配置 ##################
# 摄像头配置
# 巡线参数配置
LINE_COLOR_THRESHOLD = (0, 80) # 黑色线阈值 (L*通道)
ROI = (0, 180, 320, 60) # 感兴趣区域(图像底部)
MIN_LINE_LENGTH = 50 # 最小线段长度
MAX_LINE_ANGLE_DIFF = 20 # 最大线段角度差
CENTER_X = 160 # 图像中心X坐标
# ################## 辅助函数 ##################
def calculate_path_center(left_line, right_line):
"""计算两条线段中点之间的中心点"""
# 计算线段1的中点
mid1_x = (left_line.x1() + left_line.x2()) // 2
mid1_y = (left_line.y1() + left_line.y2()) // 2
# 计算线段2的中点
mid2_x = (right_line.x1() + right_line.x2()) // 2
mid2_y = (right_line.y1() + right_line.y2()) // 2
# 计算两个中点之间的中心点
center_x = (mid1_x + mid2_x) // 2
center_y = (mid1_y + mid2_y) // 2
return center_x, center_y
def calculate_offset_angle(left_line, right_line):
"""计算路径偏移角度"""
# 计算左右线的平均角度
left_angle = left_line.theta()
right_angle = right_line.theta()
# 处理角度值(确保在0-180范围内)
if left_angle < 0:
left_angle += 180
if right_angle < 0:
right_angle += 180
# 计算平均角度(路径方向)
avg_angle = (left_angle + right_angle) / 2
# 计算相对于垂直方向的偏移角度(90度为垂直方向)
offset_angle = avg_angle - 90
return offset_angle
def get_line_data(lines):
"""处理检测到的线段,返回左右线信息"""
left_lines = []
right_lines = []
valid_lines = []
for line in lines:
# 计算线段角度 (转换为0-180度范围)
angle = line.theta()
if angle < 0:
angle += 180
# 过滤掉过短或过平的线段
if line.length() < MIN_LINE_LENGTH or (angle < 10 or angle > 170):
continue
# 根据角度区分左右线
if 70 < angle < 110: # 近似水平的线
continue
elif angle > 90: # 左线 (135-180度)
left_lines.append(line)
else: # 右线 (0-45度)
right_lines.append(line)
valid_lines.append(line)
# 选择最长的左线和右线
left_line = max(left_lines, key=lambda l: l.length()) if left_lines else None
right_line = max(right_lines, key=lambda l: l.length()) if right_lines else None
return left_line, right_line, valid_lines
try:
sensor=Sensor(id=2)
sensor.reset() # 复位摄像头
sensor.set_pixformat(sensor.RGB565) # 使用RGB565格式
sensor.set_framesize(sensor.QVGA) # 使用QVGA分辨率(320x240)
sensor.set_vflip(True) # 垂直翻转图像(根据摄像头安装方式)
sensor.set_hmirror(True) # 水平镜像图像(根据摄像头安装方式)
sensor.skip_frames(time=500) # 等待摄像头稳定
Display.init(Display.VIRT, width=320, height=240, to_ide=True)
# 初始化媒体管理器
MediaManager.init()
# 启动传感器
sensor.run()
# ################## 主循环 ##################
clock = time.clock()
while True:
os.exitpoint()
clock.tick()
# 1. 图像采集
img = sensor.snapshot()
# 2. 图像预处理
img.lens_corr(1.8) # 镜头畸变校正
img_gray = img.to_grayscale(copy=True)
img_bin = img_gray.binary([LINE_COLOR_THRESHOLD], invert=True, roi=ROI)
# 3. 检测线段
lines = img_bin.find_lines(threshold=1000, theta_margin=25, rho_margin=25, roi=ROI)
# 4. 处理线段数据
left_line, right_line, valid_lines = get_line_data(lines)
# 5. 计算路径信息
path_data = {
'center_x': CENTER_X, # 图像中心X
'center_y': ROI[1] + ROI[3]//2, # ROI中心Y
'offset_angle': 0, # 偏移角度
'offset_error': 0, # 水平偏移误差
'left_line': None, # 左线数据
'right_line': None, # 右线数据
'path_found': False # 是否检测到路径
}
if left_line and right_line:
# 计算路径中心点
path_center_x, path_center_y = calculate_path_center(left_line, right_line)
# 计算偏移角度
offset_angle = calculate_offset_angle(left_line, right_line)
# 计算水平偏移误差
offset_error = path_center_x - CENTER_X
# 更新路径数据
path_data.update({
'center_x': path_center_x,
'center_y': path_center_y,
'offset_angle': offset_angle,
'offset_error': offset_error,
'left_line': (left_line.x1(), left_line.y1(), left_line.x2(), left_line.y2()),
'right_line': (right_line.x1(), right_line.y1(), right_line.x2(), right_line.y2()),
'path_found': True
})
# 6. 输出路径数据
print("路径数据:", path_data)
# 7. 可视化(可选,用于调试)
# 绘制ROI区域
img.draw_rectangle(ROI, color=(0, 255, 0))
# 绘制检测到的线段
for line in valid_lines:
img.draw_line(line.line(), color=(255, 0, 0), thickness=2)
# 绘制路径中心点
if path_data['path_found']:
img.draw_cross(int(path_data['center_x']), int(path_data['center_y']),
color=(0, 255, 255), size=10, thickness=2)
# 绘制图像中心线
img.draw_line((CENTER_X, 0, CENTER_X, 240), color=(0, 0, 255), thickness=1)
# 显示调试信息
fps = clock.fps()
img.draw_string(10, 10, "FPS: %.1f" % fps, color=(255, 255, 255))
img.draw_string(10, 30, "偏移角度: %.1f°" % path_data['offset_angle'], color=(255, 255, 255))
img.draw_string(10, 50, "偏移误差: %d" % path_data['offset_error'], color=(255, 255, 255))
# 控制帧率
time.sleep_ms(50)
except KeyboardInterrupt as e:
print("用户停止: ", e)
except BaseException as e:
print(f"异常: {e}")
finally:
# 停止传感器运行
if isinstance(sensor, Sensor):
sensor.stop()
# 反初始化显示模块
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# 释放媒体缓冲区
MediaManager.deinit()
# ################## 输出数据结构说明 ##################
"""
返回的路径数据字典包含以下字段:
{
'center_x': 路径中心点的X坐标,
'center_y': 路径中心点的Y坐标,
'offset_angle': 路径偏移角度(度),
- 正值:路径向右偏转
- 负值:路径向左偏转
- 0:路径直行
'offset_error': 水平偏移误差(像素),
- 正值:路径中心在图像中心右侧
- 负值:路径中心在图像中心左侧
'left_line': 左边界线坐标 (x1, y1, x2, y2),
'right_line': 右边界线坐标 (x1, y1, x2, y2),
'path_found': 是否成功检测到路径 (True/False)
}
"""
期待结果和实际结果
软硬件版本信息
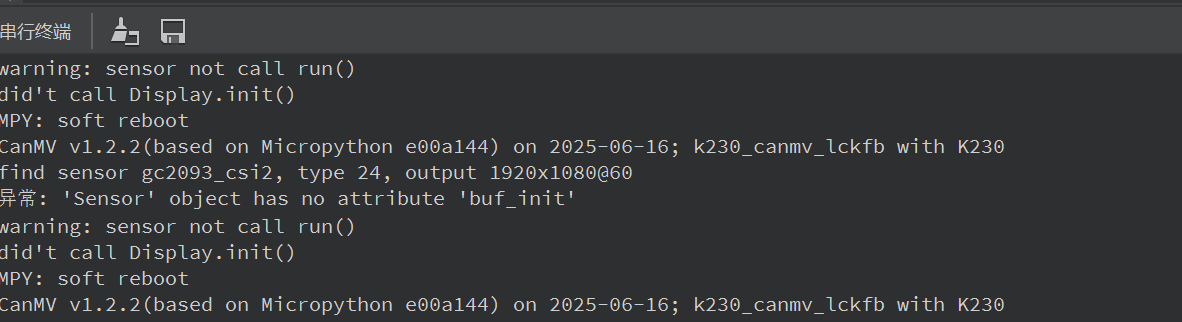
错误日志
尝试解决过程
补充材料
