用yolo8训练的模型做送药小车,看了yolov8的历程,可以使用,但是不知道输出时具体用的是什么通道?我看API发现,是用get_frame()获取一帧图片给AI程序使用,但是返回值是ulab.numpy.ndarray格式。我做巡线也用摄像头,返回的ulab.numpy.ndarray格式没办法给巡线使用,所以我参考了前面大佬回复的相关双线程的问题,想给巡线单独配置一个通道使用,但是没有相关教程,配置一直出错。
期待结果和实际结果
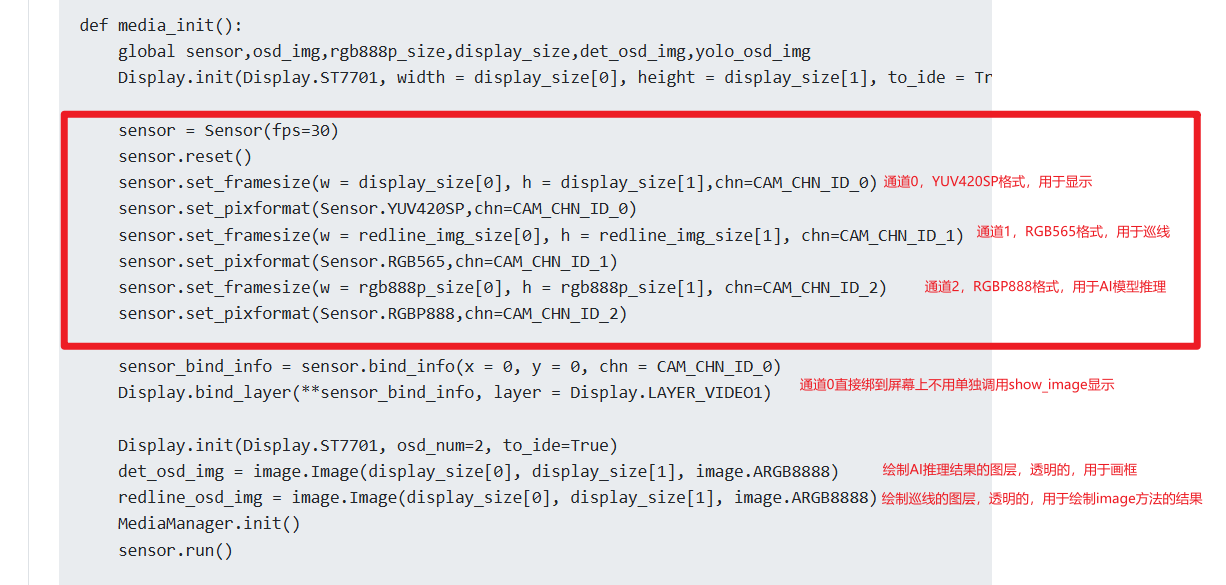
配置通道
补充材料
下面是官方yolov8模型调用的代码:
from libs.PipeLine import PipeLine
from libs.YOLO import YOLOv8
from libs.Utils import *
from media.sensor import *
from media.display import *
from media.media import *
import time, gc, _thread, ujson, utime, os, sys,image
import ulab.numpy as np
from machine import UART, FPIOA, Pin
# ---------- 串口初始化 ----------
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
uart = UART(UART.UART2, baudrate=9600, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
if __name__=="__main__":
# 这里仅为示例,自定义场景请修改为您自己的模型路径、标签名称、模型输入大小
kmodel_path="/sdcard/test_number.kmodel"
labels = ["1","2","3","4","5","6","7","8"]
model_input_size=[320,320]
display_mode="lcd"
rgb888p_size=[640,360]
confidence_threshold = 0.4
nms_threshold=0.4
# 初始化PipeLine
pl=PipeLine(rgb888p_size=rgb888p_size,display_mode=display_mode)
pl.create()
display_size=pl.get_display_size()
# 初始化YOLOv8实例
yolo=YOLOv8(task_type="detect",mode="video",kmodel_path=kmodel_path,labels=labels,rgb888p_size=rgb888p_size,model_input_size=model_input_size,display_size=display_size,conf_thresh=confidence_threshold,nms_thresh=nms_threshold,mask_thresh=1,max_boxes_num=50,debug_mode=0)
yolo.config_preprocess()
while True:
with ScopedTiming("total",1):
# 逐帧推理
img=pl.get_frame()
res=yolo.run(img)
# res说明
# res[0] = [bbox1, bbox2, ...] # 每个目标的边界框:数组格式 [x, y, w, h]
# res[1] = [class_id1, class_id2, ...] # 每个目标对应的类别索引
# res[2] = [score1, score2, ...] # 每个目标对应的置信度分数
boxes, class_ids, scores = res
start_x = 5
start_y = 5
line_height = 20
for i in range(min(4, len(class_ids))):
x, y, w, h = boxes[i]
cx = int(x + w / 2)
cy = int(y + h / 2)
class_id = class_ids[i]
label = labels[class_id] if class_id < len(labels) else str(class_id)
text = "{}:({},{})".format(label, cx, cy)
print(text)
yolo.draw_result(res,pl.osd_img)
pl.show_image()
gc.collect()
yolo.deinit()
pl.destroy()
"""
我想在上面的基础上配置一个通道,将输出的图片信息提供给巡线使用。
下面是巡线模块:
"""
from media.sensor import *
from media.display import *
from media.media import *
from machine import UART, FPIOA, Pin
import time, utime, image, gc
# ---------- 串口初始化 ----------
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
uart = UART(UART.UART2, baudrate=9600, bits=UART.EIGHTBITS,
parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
# ---------- 摄像头配置 ----------
sensor = Sensor(width=1280, height=720)
sensor.reset()
sensor.set_framesize(width=800, height=480, chn=CAM_CHN_ID_1)
sensor.set_pixformat(Sensor.RGB565, chn=CAM_CHN_ID_1)
Display.init(Display.ST7701, width=800, height=480, to_ide=True)
MediaManager.init()
sensor.run()
# ---------- 颜色阈值 ----------
red_threshold = [(20, 60, 20, 127, -128, 127)]
black_threshold = [(0, 30)] # 黑色色块检测(终点)
# ---------- ROI 区域 ----------
ROIS_MID = [
(200, 120, 400, 40),
(200, 200, 400, 40),
(200, 280, 400, 40),
]
ROIS_LR = [
(0, 0, 200, 100), # 左
(600, 0, 200, 100), # 右
]
# ---------- 全局状态变量 ----------
turn_state = 0 # 0 正常, 1 左转中, 2 右转中
at_intersection = False
intersection_flag = False
wait_for_manage = False
end_flag = False
# ---------- 功能函数 ----------
def draw_rois(img):
for r in ROIS_MID + ROIS_LR:
img.draw_rectangle(r, color=(0, 255, 0))
def compute_offset(blobs):
weight_sum, cx_sum = 0, 0
weights = [0.3, 0.4, 0.3]
for i, b in enumerate(blobs):
if b:
largest = max(b, key=lambda x: x.pixels())
cx_sum += largest.cx() * weights[i]
weight_sum += weights[i]
if weight_sum == 0:
return 0
cx = cx_sum / weight_sum
dx = int(cx - 400)
return dx
def get_red_offset(img):
blobs_mid = [img.find_blobs(red_threshold, roi=roi, merge=True) for roi in ROIS_MID]
return compute_offset(blobs_mid)
def detect_intersection(img):
left = img.find_blobs(red_threshold, roi=ROIS_LR[0], merge=True)
right = img.find_blobs(red_threshold, roi=ROIS_LR[1], merge=True)
left_ok = any(b.pixels() > 1500 for b in left)
right_ok = any(b.pixels() > 1500 for b in right)
return left_ok, right_ok
def detect_end(img):
count = 0
blobs = img.find_blobs(black_threshold, roi=(0, 400, 800, 80), pixels_threshold=1000)
for b in blobs:
if b.pixels() > 1500:
count += 1
return count >= 5
def send_uart(msg, debug_text=None):
uart.write((msg + "\n").encode())
if debug_text:
print(msg + " —— " + debug_text)
else:
print(msg)
def receive_turn_command(dx):
global turn_state, intersection_flag, wait_for_manage
if uart.any():
cmd = uart.read().decode().strip()
if cmd == "1":
turn_state = 1
send_uart("[1,0]", "左转")
wait_for_manage = True
intersection_flag = False
elif cmd == "2":
turn_state = 2
send_uart("[2,0]", "右转")
wait_for_manage = True
intersection_flag = False
elif cmd == "0":
turn_state = 0
send_uart(f"[0,{dx}]", "直行")
intersection_flag = False
def wait_turn_finish():
global wait_for_manage, turn_state
if uart.any():
cmd = uart.read().decode().strip()
if (turn_state == 1 and "left-manage" in cmd) or (turn_state == 2 and "right-manage" in cmd):
wait_for_manage = False
turn_state = 0
print("转弯完成,恢复直行")
# ---------- 帧率初始化 ----------
last_time = utime.ticks_ms()
# ---------- 主循环 ----------
while True:
start_time = utime.ticks_ms()
draw_rois(img)
if not end_flag and detect_end(img):
send_uart("[3,0]", "终点识别,停止")
end_flag = True
continue
dx = get_red_offset(img)
left_ok, right_ok = detect_intersection(img)
if left_ok and right_ok and not at_intersection:
intersection_flag = True
at_intersection = True
send_uart("[0,0]", "十字路口检测,等待指令...")
continue
elif not (left_ok and right_ok):
at_intersection = False
if intersection_flag:
receive_turn_command(dx)
elif wait_for_manage:
wait_turn_finish()
elif not end_flag:
send_uart(f"[0,{dx}]", f"巡线中 dx={dx}")
# ---------- 计算与显示 FPS ----------
end_time = utime.ticks_ms()
duration = utime.ticks_diff(end_time, start_time)
fps = 1000 / duration if duration > 0 else 0
print("FPS: {:.2f}".format(fps))
img.draw_string(5, 5, "FPS: {:.1f}".format(fps), scale=2, color=(255, 255, 255))
Display.show_image(img)
gc.collect()
time.sleep_ms(100)
"""
下面是数字识别模块:
"""
from libs.PipeLine import PipeLine
from libs.YOLO import YOLOv8
from libs.Utils import *
from media.sensor import *
from media.display import *
from media.media import *
import time, gc, ujson, utime, os, sys, image
import ulab.numpy as np
from machine import UART, FPIOA, Pin
# ---------- 串口初始化 ----------
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
uart = UART(UART.UART2, baudrate=9600, bits=UART.EIGHTBITS,
parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
# ---------- 数字识别模型和参数 ----------
kmodel_path = "/sdcard/test_number.kmodel"
labels = ["1", "2", "3", "4", "5", "6", "7", "8"]
model_input_size = [320, 320]
display_mode = "lcd"
rgb888p_size = [640, 360]
confidence_threshold = 0.3
nms_threshold = 0.45
# ---------- 初始化视觉模块 ----------
pl = PipeLine(rgb888p_size=rgb888p_size, display_mode=display_mode)
pl.create()
display_size = pl.get_display_size()
yolo = YOLOv8(task_type="detect", mode="video", kmodel_path=kmodel_path,
labels=labels, rgb888p_size=rgb888p_size, model_input_size=model_input_size,
display_size=display_size, conf_thresh=confidence_threshold,
nms_thresh=nms_threshold, max_boxes_num=5, debug_mode=0)
yolo.config_preprocess()
# ---------- 全局变量 ----------
first_digit = None
mode = 0 # 0: 空闲,1: 等待保存数字,2: 对比模式
compare_count = 0
compare_total = 5
# ---------- 判断相对位置 ----------
def analyze_res_position(res):
bboxes = res[0]
class_ids = res[1]
result = []
center_x = 800 // 2
for i in range(min(4, len(bboxes))):
x, y, w, h = bboxes[i]
label = class_ids[i]
obj_center_x = x + w / 2
position = "left" if obj_center_x < center_x else "right"
result.append([label, position])
return result
# ---------- 比较函数 ----------
def compare_with_reference(ref_digit, result_list):
for label_idx, pos in result_list:
label_str = labels[label_idx] if 0 <= label_idx < len(labels) else str(label_idx)
if label_str == ref_digit:
return pos
return "go straight"
# ---------- 封装:获取稳定的第一个数字 ----------
def get_stable_first_label(res):
class_ids = res[1]
if len(class_ids) == 1:
idx = class_ids[0]
if 0 <= idx < len(labels):
return labels[idx]
return None
# ---------- 串口输出和打印函数 ----------
def print_and_send(msg):
# 打印到终端
print(msg)
# 发送到串口
uart.write((msg + "\n").encode())
# ---------- 主循环 ----------
while True:
with ScopedTiming("total", 1):
img = pl.get_frame()
res = yolo.run(img)
# 串口监听指令
if uart.any():
try:
cmd = uart.read().decode().strip()
if cmd == "1":
if first_digit is None:
mode = 1
print_and_send("准备记录第一个数字,请确保画面中仅有一个数字...")
else:
mode = 2
compare_count = 0
print_and_send("进入对比模式,参考数字为:" + str(first_digit))
elif cmd == "2":
print_and_send("收到结束指令,退出程序")
break
except Exception as e:
print("串口读取错误:", e)
# ---------- 模式1:记录第一个数字 ----------
if mode == 1 and first_digit is None:
label = get_stable_first_label(res)
if label:
first_digit = label
print_and_send("记录成功,第一个数字为:" + str(first_digit))
mode = 0
else:
print_and_send("等待仅出现一个数字...")
# ---------- 模式2:对比参考数字 ----------
elif mode == 2 and first_digit:
result = analyze_res_position(res)
decision = compare_with_reference(first_digit, result)
print_and_send("对比结果:" + decision)
compare_count += 1
if compare_count >= compare_total:
print_and_send("比对结束,共输出" + str(compare_total) + "次")
mode = 0
yolo.draw_result(res, pl.osd_img)
pl.show_image()
gc.collect()
# ---------- 释放资源 ----------
yolo.deinit()
pl.destroy()
"""