重现步骤
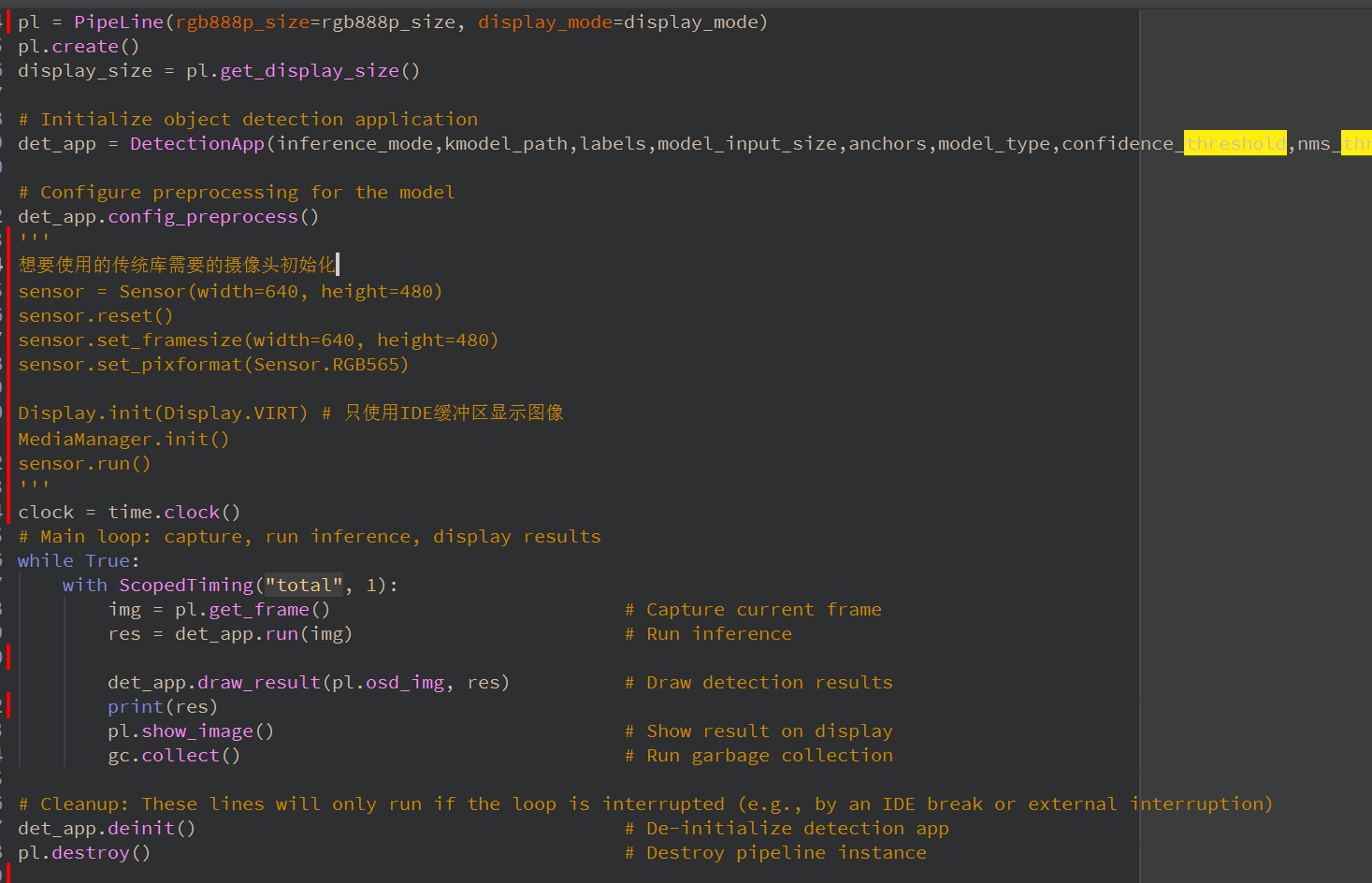
因为想要使用传统库处理 所以对摄像头初始化但这里的问题 在原先程序中他已经初始化过了 不过他初始化的获取的图像对象没有我需要方法 直接再加上一个初始化会报错显示已经初始化过了
期待结果和实际结果
<!- 你期待的结果是什么?实际看到的结果是什么? -->预期可以正常初始化 实际报错
庐山派K230
软硬件版本信息
错误日志
尝试解决过程
补充材料
重现步骤
因为想要使用传统库处理 所以对摄像头初始化但这里的问题 在原先程序中他已经初始化过了 不过他初始化的获取的图像对象没有我需要方法 直接再加上一个初始化会报错显示已经初始化过了
期待结果和实际结果
<!- 你期待的结果是什么?实际看到的结果是什么? -->预期可以正常初始化 实际报错
庐山派K230
软硬件版本信息
错误日志
尝试解决过程
补充材料
参考下面的代码:
import os,sys,gc,time,ujson
from media.sensor import *
from media.display import *
from media.media import *
from libs.PlatTasks import DetectionApp
from libs.Utils import *
import nncase_runtime as nn
import ulab.numpy as np
import image
display_size=[800,480]
rgb565_size=[640,480]
rgb888p_size=[640,360]
sensor = Sensor()
sensor.reset()
#sensor.set_hmirror(False)
#sensor.set_vflip(False)
Display.init(Display.ST7701, width=display_size[0], height=display_size[1], osd_num=1, to_ide=True)
# 通道0直接给到显示VO,格式为YUV420
sensor.set_framesize(width = display_size[0], height = display_size[1],chn=CAM_CHN_ID_0)
sensor.set_pixformat(Sensor.YUV420SP,chn=CAM_CHN_ID_0)
# 通道1 给到openmv
sensor.set_framesize(width = rgb565_size[0], height = rgb565_size[1],chn=CAM_CHN_ID_1)
sensor.set_pixformat(Sensor.RGB565,chn=CAM_CHN_ID_1)
# 通道2给到AI做算法处理,格式为RGB888
sensor.set_framesize(width = rgb888p_size[0], height = rgb888p_size[1], chn=CAM_CHN_ID_2)
sensor.set_pixformat(Sensor.RGBP888, chn=CAM_CHN_ID_2)
# OSD图像初始化
osd_img = image.Image(display_size[0], display_size[1], image.ARGB8888)
sensor_bind_info = sensor.bind_info(x = 0, y = 0, chn = CAM_CHN_ID_0)
Display.bind_layer(**sensor_bind_info, layer = Display.LAYER_VIDEO1)
# media初始化
MediaManager.init()
# 启动sensor
sensor.run()
# Set root directory path for model and config
root_path = "/sdcard/mp_deployment_source/"
# Load deployment configuration
deploy_conf = read_json(root_path + "/deploy_config.json")
kmodel_path = root_path + deploy_conf["kmodel_path"] # KModel path
labels = deploy_conf["categories"] # Label list
confidence_threshold = deploy_conf["confidence_threshold"] # Confidence threshold
nms_threshold = deploy_conf["nms_threshold"] # NMS threshold
model_input_size = deploy_conf["img_size"] # Model input size
nms_option = deploy_conf["nms_option"] # NMS strategy
model_type = deploy_conf["model_type"] # Detection model type
anchors = []
if model_type == "AnchorBaseDet":
anchors = deploy_conf["anchors"][0] + deploy_conf["anchors"][1] + deploy_conf["anchors"][2]
# Inference configuration
inference_mode = "video" # Inference mode: 'video'
debug_mode = 0 # Debug mode flag
# Initialize object detection application
det_app = DetectionApp(inference_mode,kmodel_path,labels,model_input_size,anchors,model_type,confidence_threshold,nms_threshold,rgb888p_size,display_size,debug_mode=debug_mode)
# Configure preprocessing for the model
det_app.config_preprocess()
# Main loop: capture, run inference, display results
while True:
with ScopedTiming("total", 1):
# ----------------这里拿到一帧rgb565的图像可以给openmv使用-----------
img_rgb565=sensor.snapshot(chn=CAM_CHN_ID_1)
# ---------------------------------------------------------------
# ----------------这里拿到一帧rgb888p的图像给AI模型使用---------------
img_rgb888p = sensor.snapshot(chn=CAM_CHN_ID_2) # Capture current frame
img_np=img_rgb888p.to_numpy_ref()
res = det_app.run(img_np) # Run inference
det_app.draw_result(osd_img, res) # Draw detection results
Display.show_image(osd_img, 0, 0, Display.LAYER_OSD0)
# ---------------------------------------------------------------
gc.collect() # Run garbage collection
# Cleanup: These lines will only run if the loop is interrupted (e.g., by an IDE break or external interruption)
det_app.deinit() # De-initialize detection app
sensor.stop()
# deinit lcd
Display.deinit()
time.sleep_ms(50)
# deinit media buffer
MediaManager.deinit()
