examples\ai\face_detection\src\main.cc
/* Copyright (c) 2023, Canaan Bright Sight Co., Ltd
*/
#include <iostream>
#include <thread>
#include "ai_utils.h"
#include "face_detection.h"
#include "setting.h"
#include "video_pipeline.h"
#include "lvgl.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <getopt.h>
#include <signal.h>
#include "lvgl.h"
#include "lv_k230_display.h"
#include "lv_k230_input_touch.h"
#include "k_gsdma_comm.h"
#include "mpi_vb_api.h"
#define MAX_DISPLATY_WIDTH (1920)
#define MAX_DISPLATY_HEIGHT (1080)
// Global variables for signal handling
static volatile int g_signal_received = 0;
static lv_display_t* g_display = NULL;
// Signal handler for graceful shutdown
static void signal_handler(int signum)
{
printf("\nReceived signal %d, shutting down...\n", signum);
g_signal_received = 1;
}
std::atomic<bool> isp_stop(false);
void video_proc(char *argv[])
{
int debug_mode = atoi(argv[5]);
FrameCHWSize image_size={AI_FRAME_CHANNEL,AI_FRAME_HEIGHT, AI_FRAME_WIDTH};
// 创建一个空的Mat对象,用于存储绘制的帧
cv::Mat draw_frame(OSD_HEIGHT, OSD_WIDTH, CV_8UC4, cv::Scalar(0, 0, 0, 0));
// 创建一个空的runtime_tensor对象,用于存储输入数据
runtime_tensor input_tensor;
dims_t in_shape { 1, AI_FRAME_CHANNEL, AI_FRAME_HEIGHT, AI_FRAME_WIDTH };
// 创建一个PipeLine对象,用于处理视频流
PipeLine pl(debug_mode);
// 初始化PipeLine对象
pl.Create();
// 创建一个DumpRes对象,用于存储帧数据
DumpRes dump_res;
// 创建FaceDetection实例
FaceDetection fd(argv[1], atof(argv[2]),atof(argv[3]), image_size, debug_mode);
vector<FaceDetectionInfo> results;
while(!isp_stop){
// 创建一个ScopedTiming对象,用于计算总时间
ScopedTiming st("total time", 1);
// 从PipeLine中获取一帧数据,并创建tensor
pl.GetFrame(dump_res);
input_tensor = host_runtime_tensor::create(typecode_t::dt_uint8, in_shape, { (gsl::byte *)dump_res.virt_addr, compute_size(in_shape) },false, hrt::pool_shared, dump_res.phy_addr).expect("cannot create input tensor");
hrt::sync(input_tensor, sync_op_t::sync_write_back, true).expect("sync write_back failed");
//前处理,推理,后处理
results.clear();
fd.pre_process(input_tensor);
fd.inference();
fd.post_process(image_size,results);
draw_frame.setTo(cv::Scalar(0, 0, 0, 0));
fd.draw_result(draw_frame,results,false);
// 将绘制的帧插入到PipeLine中
pl.InsertFrame(draw_frame.data);
// 释放帧数据
pl.ReleaseFrame(dump_res);
}
pl.Destroy();
}
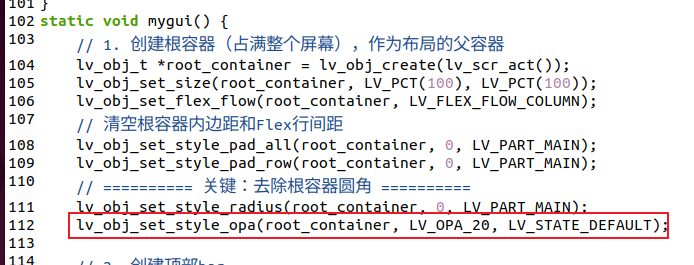
static void mygui() {
// 根
lv_obj_t *root_container = lv_obj_create(lv_scr_act());
lv_obj_set_size(root_container, LV_PCT(100), LV_PCT(100));
lv_obj_set_flex_flow(root_container, LV_FLEX_FLOW_COLUMN);
lv_obj_set_style_pad_all(root_container, 0, LV_PART_MAIN);
lv_obj_set_style_pad_row(root_container, 0, LV_PART_MAIN);
lv_obj_set_style_radius(root_container, 0, LV_PART_MAIN);
lv_obj_set_style_opa(root_container, LV_OPA_20, LV_STATE_DEFAULT); //
// bar
lv_obj_t *top_bar = lv_obj_create(root_container);
lv_obj_set_size(top_bar, LV_PCT(100), 25);
lv_obj_set_style_pad_all(top_bar, 0, LV_PART_MAIN);
lv_obj_set_style_margin_all(top_bar, 0, LV_PART_MAIN);
lv_obj_set_style_radius(top_bar, 0, LV_PART_MAIN);
lv_obj_set_style_bg_color(top_bar, lv_color_hex(0x3b82f6), LV_PART_MAIN);
lv_obj_t *bar_label = lv_label_create(top_bar);
lv_label_set_text(bar_label, "Top bar");
lv_obj_set_style_text_color(bar_label, lv_color_white(), LV_PART_MAIN);
lv_obj_center(bar_label);
// 下方
lv_obj_t *content_container = lv_obj_create(root_container);
lv_obj_set_width(content_container, LV_PCT(100));
lv_obj_set_flex_grow(content_container, 1);
lv_obj_set_style_pad_all(content_container, 0, LV_PART_MAIN);
lv_obj_set_style_margin_all(content_container, 0, LV_PART_MAIN);
lv_obj_set_style_radius(content_container, 0, LV_PART_MAIN);
lv_obj_set_style_bg_color(content_container, lv_color_hex(0xf3f4f6), LV_PART_MAIN);
lv_obj_t *content_label = lv_label_create(content_container);
lv_label_set_text(content_label, "main");
lv_obj_center(content_label);
}
int vb_init(void)
{
k_s32 ret;
k_vb_config config;
k_vb_supplement_config supplement_config;
memset(&config, 0x00, sizeof(config));
config.max_pool_cnt = VB_MAX_POOLS;
// for gdma rotate
config.comm_pool[0].blk_cnt = 1;
config.comm_pool[0].mode = VB_REMAP_MODE_NOCACHE;
config.comm_pool[0].blk_size = VB_ALIGN_UP(MAX_DISPLATY_WIDTH * MAX_DISPLATY_HEIGHT * 4, 4096);
ret = kd_mpi_vb_set_config(&config);
if (ret) {
printf("vb_set_config failed ret:%d\n", ret);
return ret;
}
memset(&supplement_config, 0, sizeof(supplement_config));
supplement_config.supplement_config |= VB_SUPPLEMENT_JPEG_MASK;
ret = kd_mpi_vb_set_supplement_config(&supplement_config);
if (ret) {
printf("vb_set_supplement_config failed ret:%d\n", ret);
return ret;
}
ret = kd_mpi_vb_init();
if (ret) {
printf("vb_init failed ret:%d\n", ret);
return ret;
}
return 0;
}
int vb_deinit(void)
{
kd_mpi_vb_exit();
return 0;
}
// Parse color format from argument
static lv_color_format_t parse_color_format(const char* format)
{
if (strcmp(format, "rgb565") == 0) {
return LV_COLOR_FORMAT_RGB565;
} else if (strcmp(format, "rgb888") == 0) {
return LV_COLOR_FORMAT_RGB888;
} else if (strcmp(format, "argb8888") == 0) {
return LV_COLOR_FORMAT_ARGB8888;
} else {
printf("Unknown color format: %s, using default: rgb888\n", format);
return LV_COLOR_FORMAT_RGB888;
}
}
// Get color format as string
static const char* color_format_to_string(lv_color_format_t format)
{
switch (format) {
case LV_COLOR_FORMAT_RGB565:
return "RGB565";
case LV_COLOR_FORMAT_RGB888:
return "RGB888";
case LV_COLOR_FORMAT_ARGB8888:
return "ARGB8888";
default:
return "Unknown";
}
}
// Convert degrees to LVGL display rotation type
static lv_display_rotation_t parse_rotation(int degrees)
{
/* gdma rotate 90 with lvgl rotate is reversed */
switch (degrees) {
case 90:
return LV_DISPLAY_ROTATION_270;
case 180:
return LV_DISPLAY_ROTATION_180;
case 270:
return LV_DISPLAY_ROTATION_90;
default:
return LV_DISPLAY_ROTATION_0;
}
}
int main(int argc, char *argv[])
{
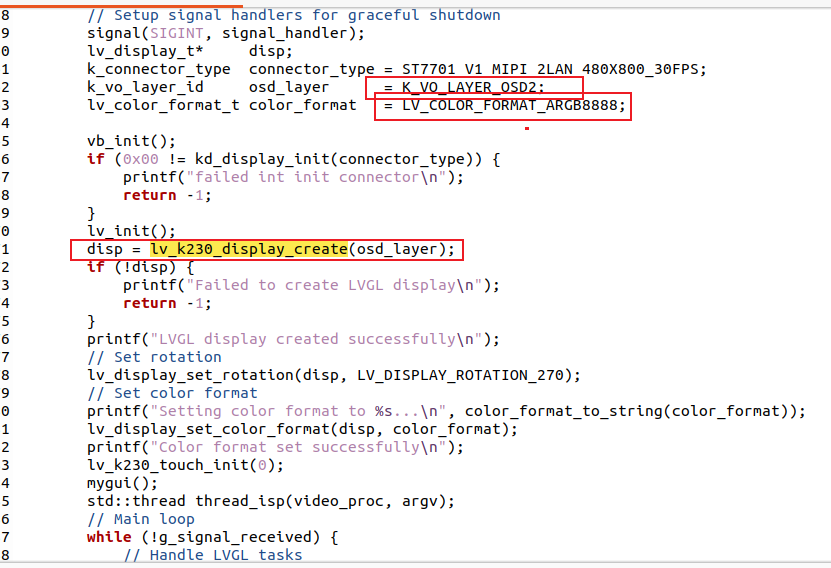
// Setup signal handlers for graceful shutdown
signal(SIGINT, signal_handler);
lv_display_t* disp;
k_connector_type connector_type = ST7701_V1_MIPI_2LAN_480X800_30FPS;
k_vo_layer_id osd_layer = K_VO_LAYER_OSD2;
lv_color_format_t color_format = LV_COLOR_FORMAT_ARGB8888;
vb_init();
if (0x00 != kd_display_init(connector_type)) {
printf("failed int init connector\n");
return -1;
}
lv_init();
disp = lv_k230_display_create(osd_layer);
if (!disp) {
printf("Failed to create LVGL display\n");
return -1;
}
printf("LVGL display created successfully\n");
// Set rotation
lv_display_set_rotation(disp, LV_DISPLAY_ROTATION_270);
// Set color format
printf("Setting color format to %s...\n", color_format_to_string(color_format));
lv_display_set_color_format(disp, color_format);
printf("Color format set successfully\n");
lv_k230_touch_init(0);
mygui();
std::thread thread_isp(video_proc, argv);
// Main loop
while (!g_signal_received) {
// Handle LVGL tasks
uint32_t delay_ms = lv_task_handler();
if (100 < delay_ms) {
delay_ms = 100;
}
// Use a shorter sleep to be more responsive to signals
usleep(delay_ms * 1000);
}
// Cleanup
printf("Cleaning up...\n");
if (disp) {
lv_display_delete(disp);
g_display = NULL;
}
//while (getchar() != 'q')
//{
// usleep(10000);
//}
isp_stop = true;
thread_isp.join();
return 0;
}
examples\ai\face_detection\src\videopipeline.cc
#include "video_pipeline.h"
/* 16字节对齐宏,用于硬件DMA/图像缓冲区对齐 */
#define ALIGN_UP_16(x) (((x) + 15) & ~15)
/* 构造函数:初始化管线各模块的默认配置 */
PipeLine::PipeLine(int debug_mode)
{
// ------------------------ 显示接口类型选择 ------------------------
// 根据宏 DISPLAY_MODE 选择不同屏幕(MIPI/HDMI 等)
if(DISPLAY_MODE==0){
connector_type = LT9611_MIPI_4LAN_1920X1080_30FPS;
}
else if(DISPLAY_MODE==1){
connector_type = ST7701_V1_MIPI_2LAN_480X800_30FPS;
}
else if(DISPLAY_MODE==2){
connector_type = HX8377_V2_MIPI_4LAN_1080X1920_30FPS;
}
else{
// 默认回退为 1080P HDMI 输出
connector_type = LT9611_MIPI_4LAN_1920X1080_30FPS;
}
// ------------------------ VO(视频输出)相关 ID ------------------------
vo_dev_id = K_VO_DISPLAY_DEV_ID; // VO 设备 ID
vi_vo_id = K_VO_LAYER_VIDEO1; // 用于显示摄像头视频的 VO layer
osd_vo_id = K_VO_LAYER_OSD0; // 用于叠加 OSD 的 VO layer
// ------------------------ Sensor / VICAP 默认配置 ------------------------
// 默认使用 GC2093,start() 中会根据探测结果自动适配
sensor_type = GC2093_MIPI_CSI2_1920X1080_30FPS_10BIT_LINEAR;
// VICAP 设备 ID
vicap_dev = VICAP_DEV_ID_0;
// VICAP → VO 通道(视频直通显示)
vicap_chn_to_vo = VICAP_CHN_ID_0;
// VICAP → AI 通道(用于算法推理)
vicap_chn_to_ai = VICAP_CHN_ID_1;
// 调试模式开关
debug_mode_ = debug_mode;
// OSD 所使用的 VB 内存池,初始化为无效
osd_pool_id = VB_INVALID_POOLID;
}
PipeLine::~PipeLine()
{
}
/* 管线创建:初始化 VB → 屏幕 → VO → OSD → VICAP → 绑定关系 */
int PipeLine::Create()
{
ScopedTiming st("PipeLine::Create", debug_mode_);
k_s32 ret = 0;
// =============================================================================================
// 1. 配置 Video Buffer(VB)系统
// =============================================================================================
memset(&config, 0, sizeof(k_vb_config));
config.max_pool_cnt = 64; // 最多支持 64 个内存池
// 设置 VB 全局配置
//ret = kd_mpi_vb_set_config(&config);
//if (ret) {
// printf("vb_set_config failed ret:%d\n", ret);
// return ret;
//}
// 设置 VB 附加配置(JPEG、ISP 统计等)
//k_vb_supplement_config supplement_config;
//memset(&supplement_config, 0, sizeof(supplement_config));
// supplement_config.supplement_config |= VB_SUPPLEMENT_JPEG_MASK;
//ret = kd_mpi_vb_set_supplement_config(&supplement_config);
//if (ret) {
// printf("vb_set_supplement_config failed ret:%d\n", ret);
// return ret;
//}
// 初始化 VB 子系统
//ret = kd_mpi_vb_init();
//if (ret) {
// printf("vb_init failed ret:%d\n", ret);
// return ret;
//}
// =============================================================================================
// 2. 创建 OSD 专用 VB 内存池(用于 ARGB8888 叠加图层)
// =============================================================================================
// 用于存放一帧 OSD 数据(如 AI 结果绘制)
if(USE_OSD == 1){
k_vb_pool_config pool_config;
memset(&pool_config, 0, sizeof(pool_config));
pool_config.blk_cnt = 3; // 3 个缓冲块,避免帧冲突
pool_config.blk_size = VICAP_ALIGN_UP((OSD_WIDTH * OSD_HEIGHT * OSD_CHANNEL), VICAP_ALIGN_1K);
pool_config.mode = VB_REMAP_MODE_NOCACHE; // 非 cache 映射,避免缓存一致性问题
osd_pool_id = kd_mpi_vb_create_pool(&pool_config);
}
// =============================================================================================
// 3. 屏幕(Connector)配置
// =============================================================================================
k_connector_info connector_info;
memset(&connector_info, 0, sizeof(k_connector_info));
// 根据 connector 类型获取硬件参数
ret = kd_mpi_get_connector_info(connector_type, &connector_info);
if (ret) {
printf("the connector type not supported!\n");
return ret;
}
// 打开 connector 设备
k_s32 connector_fd = kd_mpi_connector_open(connector_info.connector_name);
if (connector_fd < 0) {
printf("%s, connector open failed.\n", __func__);
return K_ERR_VO_NOTREADY;
}
// 打开电源
ret = kd_mpi_connector_power_set(connector_fd, K_TRUE);
if (ret) {
printf("ERROR: kd_mpi_connector_power_set failed, ret=%d\n", ret);
return ret;
}
// 初始化 connector(配置时序、分辨率等)
ret = kd_mpi_connector_init(connector_fd, connector_info);
if (ret) {
printf("ERROR: kd_mpi_connector_init failed, ret=%d\n", ret);
return ret;
}
// 关闭设备句柄(配置完成即可关闭)
ret = kd_mpi_connector_close(connector_fd);
if (ret) {
printf("ERROR: kd_mpi_connector_close failed, ret=%d\n", ret);
return ret;
}
// =============================================================================================
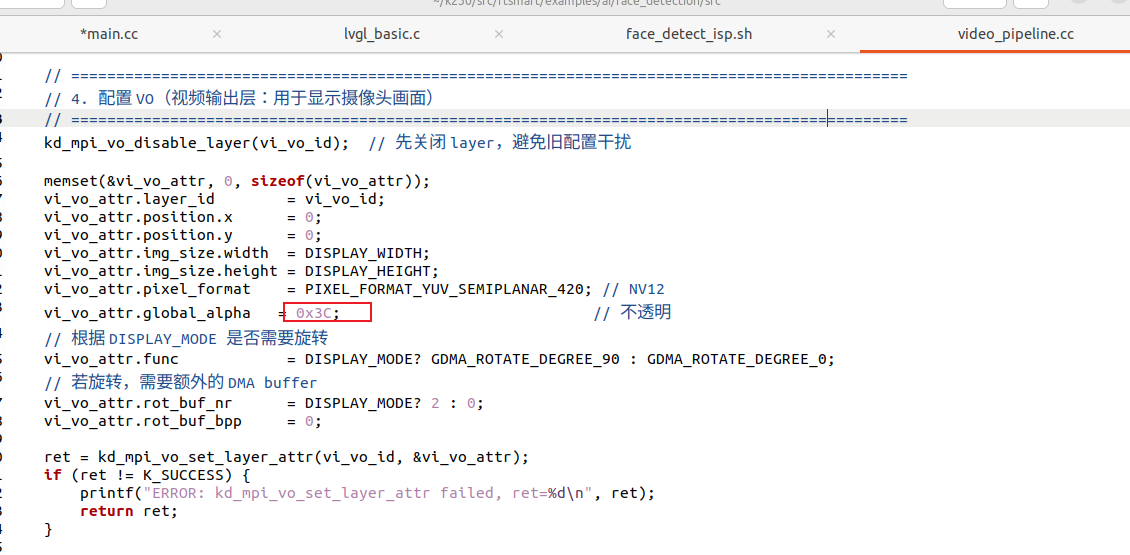
// 4. 配置 VO(视频输出层:用于显示摄像头画面)
// =============================================================================================
kd_mpi_vo_disable_layer(vi_vo_id); // 先关闭 layer,避免旧配置干扰
memset(&vi_vo_attr, 0, sizeof(vi_vo_attr));
vi_vo_attr.layer_id = vi_vo_id;
vi_vo_attr.position.x = 0;
vi_vo_attr.position.y = 0;
vi_vo_attr.img_size.width = DISPLAY_WIDTH;
vi_vo_attr.img_size.height = DISPLAY_HEIGHT;
vi_vo_attr.pixel_format = PIXEL_FORMAT_YUV_SEMIPLANAR_420; // NV12
vi_vo_attr.global_alpha = 0x3C; // 不透明
// 根据 DISPLAY_MODE 是否需要旋转
vi_vo_attr.func = DISPLAY_MODE? GDMA_ROTATE_DEGREE_90 : GDMA_ROTATE_DEGREE_0;
// 若旋转,需要额外的 DMA buffer
vi_vo_attr.rot_buf_nr = DISPLAY_MODE? 2 : 0;
vi_vo_attr.rot_buf_bpp = 0;
ret = kd_mpi_vo_set_layer_attr(vi_vo_id, &vi_vo_attr);
if (ret != K_SUCCESS) {
printf("ERROR: kd_mpi_vo_set_layer_attr failed, ret=%d\n", ret);
return ret;
}
ret = kd_mpi_vo_enable_layer(vi_vo_id);
if (ret != K_SUCCESS) {
printf("ERROR: kd_mpi_vo_enable_layer failed, ret=%d\n", ret);
return ret;
}
printf("VICAP to VO: layer=%d configured for %ux%u NV12, rotate90=%d\n",
vi_vo_id, DISPLAY_WIDTH, DISPLAY_HEIGHT, DISPLAY_MODE ? 1 : 0);
// =============================================================================================
// 5. 配置 OSD 层(ARGB8888 叠加图层)
// =============================================================================================
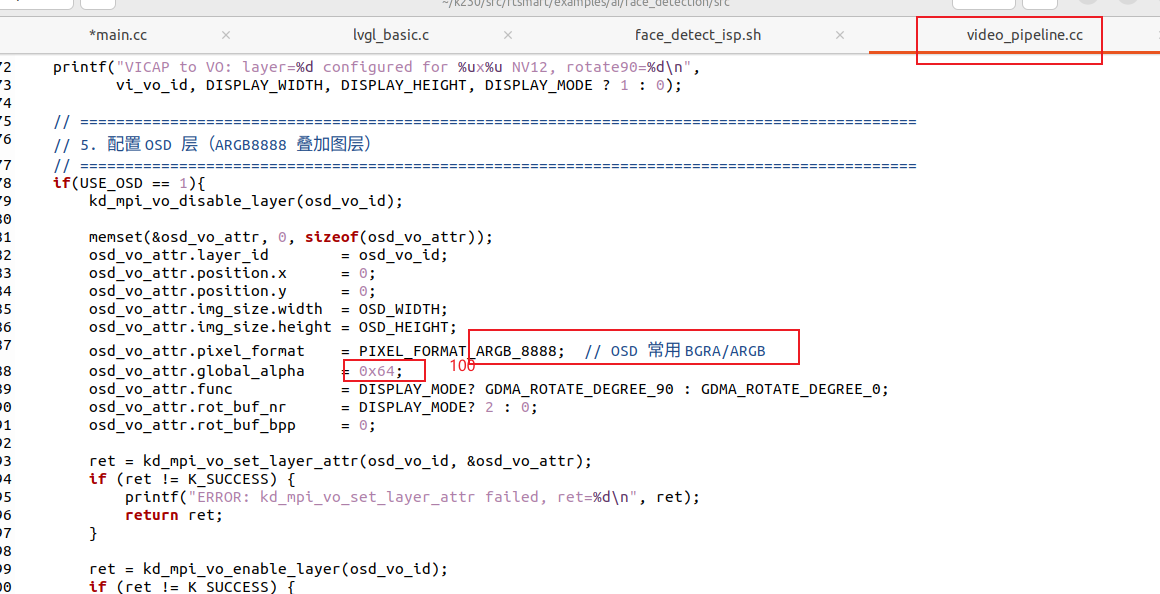
if(USE_OSD == 1){
kd_mpi_vo_disable_layer(osd_vo_id);
memset(&osd_vo_attr, 0, sizeof(osd_vo_attr));
osd_vo_attr.layer_id = osd_vo_id;
osd_vo_attr.position.x = 0;
osd_vo_attr.position.y = 0;
osd_vo_attr.img_size.width = OSD_WIDTH;
osd_vo_attr.img_size.height = OSD_HEIGHT;
osd_vo_attr.pixel_format = PIXEL_FORMAT_ARGB_8888; // OSD 常用 BGRA/ARGB
osd_vo_attr.global_alpha = 0x64;
osd_vo_attr.func = DISPLAY_MODE? GDMA_ROTATE_DEGREE_90 : GDMA_ROTATE_DEGREE_0;
osd_vo_attr.rot_buf_nr = DISPLAY_MODE? 2 : 0;
osd_vo_attr.rot_buf_bpp = 0;
ret = kd_mpi_vo_set_layer_attr(osd_vo_id, &osd_vo_attr);
if (ret != K_SUCCESS) {
printf("ERROR: kd_mpi_vo_set_layer_attr failed, ret=%d\n", ret);
return ret;
}
ret = kd_mpi_vo_enable_layer(osd_vo_id);
if (ret != K_SUCCESS) {
printf("ERROR: kd_mpi_vo_enable_layer failed, ret=%d\n", ret);
return ret;
}
printf("OSD to VO: layer=%d configured for %ux%u BGRA8888, rotate90=%d\n",
osd_vo_id, OSD_WIDTH, OSD_HEIGHT, DISPLAY_ROTATE ? 1 : 0);
// --------------------- 从 OSD VB 池获取一块缓存,用于写入叠加数据 ---------------------
k_s32 size = VICAP_ALIGN_UP(OSD_HEIGHT * OSD_WIDTH * OSD_CHANNEL, VICAP_ALIGN_1K);
// 从指定内存池中申请一块缓存
handle = kd_mpi_vb_get_block(osd_pool_id, size, NULL);
if (handle == VB_INVALID_HANDLE)
{
printf("%s get vb block error\n", __func__);
return -1;
}
// 获取该缓存块的物理地址
k_u64 phys_addr = kd_mpi_vb_handle_to_phyaddr(handle);
if (phys_addr == 0)
{
printf("%s get phys addr error\n", __func__);
return -1;
}
// 映射为用户态虚拟地址(非 cache)
k_u32* virt_addr = (k_u32 *)kd_mpi_sys_mmap(phys_addr, size);
if (virt_addr == NULL)
{
printf("%s mmap error\n", __func__);
return -1;
}
// 初始化 OSD 帧描述结构
memset(&osd_frame_info, 0, sizeof(osd_frame_info));
osd_frame_info.v_frame.width = OSD_WIDTH;
osd_frame_info.v_frame.height = OSD_HEIGHT;
osd_frame_info.v_frame.stride[0] = OSD_WIDTH*4;
osd_frame_info.v_frame.pixel_format = PIXEL_FORMAT_BGRA_8888;
osd_frame_info.mod_id = K_ID_VO;
osd_frame_info.pool_id = osd_pool_id;
osd_frame_info.v_frame.phys_addr[0] = phys_addr;
// 保存虚拟地址,用于后续 memcpy 写入 OSD 数据
insert_osd_vaddr = virt_addr;
printf("phys_addr is %lx g_pool_id is %d \n", phys_addr, osd_pool_id);
}
// =============================================================================================
// 6. 传感器探测 & VICAP 设备配置
// =============================================================================================
// 自动探测 Sensor
k_vicap_probe_config probe_cfg;
k_vicap_sensor_info sensor_info;
probe_cfg.csi_num = CONFIG_MPP_SENSOR_DEFAULT_CSI;
probe_cfg.width = ISP_WIDTH;
probe_cfg.height = ISP_HEIGHT;
probe_cfg.fps = 30;
if(0x00 != kd_mpi_sensor_adapt_get(&probe_cfg, &sensor_info)) {
printf("vicap, can't probe sensor on %d, output %dx%d@%d\n",
probe_cfg.csi_num, probe_cfg.width, probe_cfg.height, probe_cfg.fps);
return -1;
}
sensor_type = sensor_info.sensor_type;
memset(&sensor_info, 0, sizeof(k_vicap_sensor_info));
ret = kd_mpi_vicap_get_sensor_info(sensor_type, &sensor_info);
if (ret) {
printf("vicap, the sensor type not supported!\n");
return ret;
}
// 配置 VICAP 设备属性(采集窗口、工作模式、ISP 功能等)
k_vicap_dev_attr dev_attr;
memset(&dev_attr, 0, sizeof(k_vicap_dev_attr));
dev_attr.acq_win.h_start = 0;
dev_attr.acq_win.v_start = 0;
dev_attr.acq_win.width = ISP_WIDTH;
dev_attr.acq_win.height = ISP_HEIGHT;
dev_attr.mode = VICAP_WORK_ONLINE_MODE; // 在线模式
dev_attr.pipe_ctrl.data = 0xFFFFFFFF;
dev_attr.pipe_ctrl.bits.af_enable = 0;
dev_attr.pipe_ctrl.bits.ahdr_enable = 0;
dev_attr.pipe_ctrl.bits.dnr3_enable = 0;
dev_attr.cpature_frame = 0;
dev_attr.sensor_info = sensor_info;
ret = kd_mpi_vicap_set_dev_attr(vicap_dev, dev_attr);
if (ret) {
printf("vicap, kd_mpi_vicap_set_dev_attr failed.\n");
return ret;
}
// =============================================================================================
// 7. VICAP 通道 0:输出到 VO 显示
// =============================================================================================
k_vicap_chn_attr chn0_attr;
memset(&chn0_attr, 0, sizeof(k_vicap_chn_attr));
chn0_attr.out_win.width = DISPLAY_WIDTH;
chn0_attr.out_win.height = DISPLAY_HEIGHT;
chn0_attr.crop_win = dev_attr.acq_win;
chn0_attr.scale_win = chn0_attr.out_win;
chn0_attr.crop_enable = K_FALSE;
chn0_attr.scale_enable = K_FALSE;
chn0_attr.chn_enable = K_TRUE;
chn0_attr.pix_format = PIXEL_FORMAT_YUV_SEMIPLANAR_420; // NV12
chn0_attr.buffer_num = VICAP_MAX_FRAME_COUNT;
chn0_attr.buffer_size = VICAP_ALIGN_UP((DISPLAY_WIDTH * DISPLAY_HEIGHT * 3 / 2), VICAP_ALIGN_1K);
chn0_attr.buffer_pool_id = VB_INVALID_POOLID;
printf("vicap ...kd_mpi_vicap_set_chn_attr, buffer_size[%d]\n", chn0_attr.buffer_size);
ret = kd_mpi_vicap_set_chn_attr(vicap_dev, vicap_chn_to_vo, chn0_attr);
if (ret) {
printf("vicap, kd_mpi_vicap_set_chn_attr failed.\n");
return ret;
}
// 绑定 VICAP → VO(视频直通显示)
vicap_mpp_chn.mod_id = K_ID_VI;
vicap_mpp_chn.dev_id = vicap_dev;
vicap_mpp_chn.chn_id = vicap_chn_to_vo;
vo_mpp_chn.mod_id = K_ID_VO;
vo_mpp_chn.dev_id = vo_dev_id;
vo_mpp_chn.chn_id = vi_vo_id;
ret = kd_mpi_sys_bind(&vicap_mpp_chn, &vo_mpp_chn);
if (ret) {
printf("kd_mpi_sys_bind failed:0x%x\n", ret);
}
// =============================================================================================
// 8. VICAP 通道 1:输出给 AI 使用(RGB Planar)
// =============================================================================================
k_vicap_chn_attr chn1_attr;
memset(&chn1_attr, 0, sizeof(k_vicap_chn_attr));
chn1_attr.out_win.width = AI_FRAME_WIDTH;
chn1_attr.out_win.height = AI_FRAME_HEIGHT;
chn1_attr.crop_win = dev_attr.acq_win;
chn1_attr.scale_win = chn1_attr.out_win;
chn1_attr.crop_enable = K_FALSE;
chn1_attr.scale_enable = K_FALSE;
chn1_attr.chn_enable = K_TRUE;
chn1_attr.pix_format = PIXEL_FORMAT_RGB_888_PLANAR; // AI 常用输入格式
chn1_attr.buffer_num = VICAP_MAX_FRAME_COUNT;
chn1_attr.buffer_size = VICAP_ALIGN_UP((AI_FRAME_WIDTH * AI_FRAME_HEIGHT * 3 ), VICAP_ALIGN_1K);
chn1_attr.buffer_pool_id = VB_INVALID_POOLID;
printf("kd_mpi_vicap_set_chn_attr, buffer_size[%d]\n", chn1_attr.buffer_size);
ret = kd_mpi_vicap_set_chn_attr(vicap_dev, vicap_chn_to_ai, chn1_attr);
if (ret) {
printf("kd_mpi_vicap_set_chn_attr failed.\n");
return ret;
}
// 设置数据库解析模式(XML/JSON)
ret = kd_mpi_vicap_set_database_parse_mode(vicap_dev, VICAP_DATABASE_PARSE_XML_JSON);
if (ret) {
printf("kd_mpi_vicap_set_database_parse_mode failed.\n");
return ret;
}
// 初始化 VICAP
printf("kd_mpi_vicap_init\n");
ret = kd_mpi_vicap_init(vicap_dev);
if (ret) {
printf("kd_mpi_vicap_init failed.\n");
}
// 启动数据流
printf("kd_mpi_vicap_start_stream\n");
ret = kd_mpi_vicap_start_stream(vicap_dev);
if (ret) {
printf("kd_mpi_vicap_init failed.\n");
}
return ret;
}
/* 从 VICAP 通道 1 获取一帧,用于 AI 推理 */
void PipeLine::GetFrame(DumpRes &dump_res){
ScopedTiming st("PipeLine::GetFrame", debug_mode_);
int ret=0;
memset(&dump_info, 0, sizeof(k_video_frame_info));
// 从 VICAP dump 一帧(阻塞最多 1000ms)
ret = kd_mpi_vicap_dump_frame(vicap_dev, VICAP_CHN_ID_1, VICAP_DUMP_YUV, &dump_info, 1000);
if (ret)
{
printf("kd_mpi_vicap_dump_frame failed.\n");
}
// 将物理地址映射为虚拟地址,供 CPU 访问
dump_res.virt_addr = reinterpret_cast<uintptr_t>(
kd_mpi_sys_mmap(dump_info.v_frame.phys_addr[0],
AI_FRAME_CHANNEL*AI_FRAME_HEIGHT*AI_FRAME_WIDTH));
dump_res.phy_addr = reinterpret_cast<uintptr_t>(dump_info.v_frame.phys_addr[0]);
}
/* 释放当前 dump 帧 */
int PipeLine::ReleaseFrame(DumpRes &dump_res){
ScopedTiming st("PipeLine::ReleaseFrame", debug_mode_);
int ret=0;
// 解除虚拟地址映射
kd_mpi_sys_munmap(reinterpret_cast<void*>(dump_res.virt_addr),
AI_FRAME_CHANNEL*AI_FRAME_HEIGHT*AI_FRAME_WIDTH);
// 释放 VICAP dump 帧
ret = kd_mpi_vicap_dump_release(vicap_dev, VICAP_CHN_ID_1, &dump_info);
if (ret)
{
printf("kd_mpi_vicap_dump_release failed.\n");
}
return ret;
}
/* 向 OSD layer 插入一帧(用于叠加显示 AI 结果) */
int PipeLine::InsertFrame(void* osd_data){
ScopedTiming st("PipeLine::InsertFrame", debug_mode_);
int ret=0;
// 将外部生成的 OSD 数据拷贝到 VB 映射的内存中
memcpy(insert_osd_vaddr, osd_data, OSD_WIDTH * OSD_HEIGHT * OSD_CHANNEL);
// 插入到 VO 的 OSD layer
if (kd_mpi_vo_insert_frame(osd_vo_id, &osd_frame_info) != K_SUCCESS) {
printf("ERROR: kd_mpi_vo_insert_frame failed for OSD\n");
return ret;
}
return ret;
}
/* 销毁管线,释放所有资源 */
int PipeLine::Destroy()
{
ScopedTiming st("PipeLine::Destroy", debug_mode_);
int ret=0;
// ------------------ 关闭 OSD ------------------
if(USE_OSD == 1)
{
ret = kd_mpi_vo_disable_layer(osd_vo_id);
if (ret) {
printf("kd_mpi_vo_disable_layer failed.\n");
return ret;
}
ret = kd_mpi_vb_release_block(handle);
if (ret) {
printf("kd_mpi_vb_release_block failed.\n");
return ret;
}
}
printf("kd_mpi_vb_release_block\n");
// ------------------ 停止 VICAP ------------------
ret = kd_mpi_vicap_stop_stream(vicap_dev);
if (ret) {
printf("kd_mpi_vicap_stop_stream failed.\n");
return ret;
}
// 反初始化 VICAP
ret = kd_mpi_vicap_deinit(vicap_dev);
if (ret) {
printf("kd_mpi_vicap_deinit failed.\n");
return ret;
}
// ------------------ 解除 VI → VO 绑定 ------------------
ret = kd_mpi_vo_disable_layer(vi_vo_id);
if (ret) {
printf("kd_mpi_vo_disable_layer failed.\n");
return ret;
}
vicap_mpp_chn.mod_id = K_ID_VI;
vicap_mpp_chn.dev_id = vicap_dev;
vicap_mpp_chn.chn_id = vicap_chn_to_vo;
vo_mpp_chn.mod_id = K_ID_VO;
vo_mpp_chn.dev_id = vo_dev_id;
vo_mpp_chn.chn_id = vi_vo_id;
ret = kd_mpi_sys_unbind(&vicap_mpp_chn, &vo_mpp_chn);
if (ret) {
printf("kd_mpi_sys_unbind failed:0x%x\n", ret);
}
/* 等待一帧时间,确保 VO 释放 VB */
k_u32 display_ms = 1000 / 33;
usleep(1000 * display_ms);
// ------------------ 销毁 OSD 内存池 ------------------
if (osd_pool_id != VB_INVALID_POOLID){
ret = kd_mpi_sys_munmap(reinterpret_cast<void*>(insert_osd_vaddr),
OSD_WIDTH * OSD_HEIGHT * OSD_CHANNEL);
if (ret) {
printf("kd_mpi_sys_munmap failed.\n");
return ret;
}
ret = kd_mpi_vb_destory_pool(osd_pool_id);
if (ret) {
printf("kd_mpi_vb_destory_pool failed.\n");
return ret;
}
osd_pool_id = VB_INVALID_POOLID;
}
// ------------------ 反初始化 VB ------------------
ret = kd_mpi_vb_exit();
if (ret) {
printf("kd_mpi_vb_exit failed.\n");
return ret;
}
return 0;
}


应该是哪儿我没配置好,求大佬指点一下