
Sensor Module API Manual#
Attention
This module has undergone significant changes since firmware version V0.7. If you are using firmware prior to V0.7, please refer to the older version documentation.
Overview#
The sensor module on the CanMV K230 platform is responsible for image acquisition and data processing. This module provides a set of high-level APIs that developers can use to easily obtain images in different formats and sizes without needing to understand the underlying hardware implementation. Its architecture is shown in the figure below:
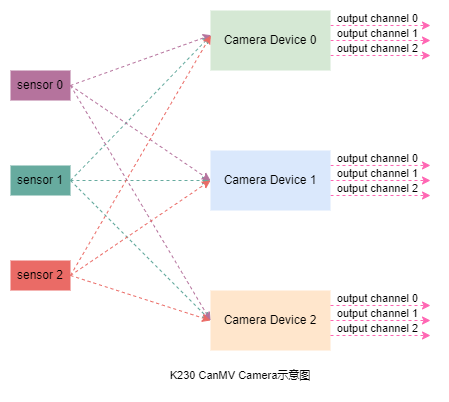
In the figure, sensor 0, sensor 1, and sensor 2 represent three image input sensor devices; Camera Device 0, Camera Device 1, and Camera Device 2 correspond to the respective image processing units; output channel 0, output channel 1, and output channel 2 indicate that each image processing unit supports up to three output channels. Through software configuration, different sensor devices can be flexibly mapped to the corresponding image processing units.
The CanMV K230 sensor module supports simultaneous connection of up to three image sensors, each of which can independently perform image data acquisition, capture, and processing. Additionally, each video channel can output three parallel streams of image data for further processing by backend modules. In practical applications, the actual number of supported sensors, input resolutions, and output channels will be limited by the development board’s hardware configuration and memory size, so a comprehensive evaluation based on project requirements is necessary.
API Introduction#
Constructor#
Description
Constructs a Sensor object via the csi id and image sensor type.
In image processing applications, users typically need to first create a Sensor object. CanMV K230 software can automatically detect built-in image sensors, without requiring users to manually specify the exact model—just set the sensor’s maximum output resolution and frame rate. For information on supported image sensors, please see the Image Sensor Support List. If the set resolution or frame rate does not match the current sensor’s default configuration, the system will automatically adjust to the optimal configuration. The final configuration can be viewed in the log, e.g., use sensor 23, output 640x480@90.
Syntax
sensor = Sensor(id, [width, height, fps])
Parameters
Parameter |
Description |
Input/Output |
Notes |
|---|---|---|---|
id |
|
Input |
Optional, default value differs for different board models |
width |
|
Input |
Optional, default |
height |
|
Input |
Optional, default |
fps |
|
Input |
Optional, default |
Return Value
Return Value |
Description |
|---|---|
Sensor object |
Sensor object |
Example
sensor = Sensor(id=0)
sensor = Sensor(id=0, width=1280, height=720, fps=60)
sensor = Sensor(id=0, width=640, height=480)
sensor.reset#
Description
Resets the sensor object. After constructing the Sensor object, this function must be called before proceeding with other operations.
Syntax
sensor.reset()
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
None |
Return Value
Return Value |
Description |
|---|---|
None |
Example
# Initialize sensor device 0 and the OV5647 sensor
sensor.reset()
sensor.set_framesize#
Description
Sets the output image size for the specified channel. Users can configure the output image size via the framesize parameter or by directly specifying width and height. The width is automatically aligned to 16 pixels.
Syntax
sensor.set_framesize(framesize=FRAME_SIZE_INVALID, chn=CAM_CHN_ID_0, alignment=0, crop = None, **kwargs)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
framesize |
sensor output image size |
Input |
chn |
sensor output channel number |
Input |
width |
output image width, kw_arg |
Input |
height |
output image height, kw_arg |
Input |
crop |
Output image crop area; |
Input |
Return Value
Return Value |
Description |
|---|---|
None |
Notes
The output image size must not exceed the actual output capability of the image sensor.
The maximum output image size for each channel is subject to hardware limitations.
Example
# Configure sensor device 0, output channel 0, with output image size of 640x480
sensor.set_framesize(chn=CAM_CHN_ID_0, width=640, height=480)
# Configure sensor device 0, output channel 1, with output image size of 320x240
sensor.set_framesize(chn=CAM_CHN_ID_1, width=320, height=240)
sensor.set_pixformat#
Description
Configures the output image format for the specified channel of the image sensor.
Syntax
sensor.set_pixformat(pix_format, chn=CAM_CHN_ID_0)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
pix_format |
Output image format |
Input |
chn |
sensor output channel number |
Input |
Return Value
Return Value |
Description |
|---|---|
None |
Example
# Configure sensor device 0, output channel 0, with NV12 output format
sensor.set_pixformat(sensor.YUV420SP, chn=CAM_CHN_ID_0)
# Configure sensor device 0, output channel 1, with RGB888 output format
sensor.set_pixformat(sensor.RGB888, chn=CAM_CHN_ID_1)
sensor.set_hmirror#
Description
Configures whether the image sensor performs horizontal mirroring.
Syntax
sensor.set_hmirror(enable)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
enable |
|
Input |
Return Value
Return Value |
Description |
|---|---|
None |
Example
sensor.set_hmirror(True)
sensor.set_vflip#
Description
Configures whether the image sensor performs vertical flipping.
Syntax
sensor.set_vflip(enable)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
enable |
|
Input |
Return Value
Return Value |
Description |
|---|---|
None |
Example
sensor.set_vflip(True)
sensor.run#
Description
Starts the image sensor output. This must be executed after calling MediaManager.init().
Syntax
sensor.run()
Return Value
Return Value |
Description |
|---|---|
None |
Notes
When using multiple sensors simultaneously (up to 3), only one of them needs to execute
run.
Example
# Start the sensor device output data stream
sensor.run()
sensor.stop#
Description
Stops the image sensor output. This method must be called before MediaManager.deinit().
Syntax
sensor.stop()
Return Value
Return Value |
Description |
|---|---|
None |
Notes
If multiple image sensors are used simultaneously (up to 3), each sensor must call
stopindividually.
Example
# Stop the data stream output of sensor device 0
sensor.stop()
sensor.snapshot#
Description
Captures one frame of image data from the specified output channel.
Syntax
sensor.snapshot(chn=CAM_CHN_ID_0, timeout = 1000, dump_frame = False)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
chn |
sensor output channel number |
Input |
timeout |
sensor timeout for capturing one frame, default 1000 ms |
Input |
dump_frame |
If True returns py_video_frame_info, otherwise returns Image |
Input |
Return Value
Return Value |
Description |
|---|---|
image object or py_video_frame_info |
Captured image data |
Other |
Capture failed |
Example
# Capture one frame of image data from channel 0 of sensor device 0
sensor.snapshot()
sensor.bind_info#
Description
Gets the binding information of the sensor channel for binding with other modules (such as the display module).
Syntax
sensor.bind_info(x=0, y=0, chn=CAM_CHN_ID_0)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
x |
Horizontal start coordinate of the binding area |
Input |
y |
Vertical start coordinate of the binding area |
Input |
chn |
Sensor output channel number |
Input |
Return Value
Return Value |
Description |
|---|---|
dict object |
Contains the channel’s source information, region size, and pixel format |
Example
# Get the binding information of sensor channel 0
info = sensor.bind_info(chn=CAM_CHN_ID_0)
print(info) # Outputs e.g. {'src': (0, 0, 0), 'rect': (0, 0, 640, 480), 'pix_format': 2}
sensor.get_hmirror#
Description
Gets the current enable status of the horizontal mirroring function.
Syntax
sensor.get_hmirror()
Return Value
Return Value |
Description |
|---|---|
bool |
|
Example
hmirror_enabled = sensor.get_hmirror()
print("Horizontal mirroring enabled:", hmirror_enabled)
sensor.get_vflip#
Description
Gets the current enable status of the vertical flipping function.
Syntax
sensor.get_vflip()
Return Value
Return Value |
Description |
|---|---|
bool |
|
Example
vflip_enabled = sensor.get_vflip()
print("Vertical flipping enabled:", vflip_enabled)
sensor.width#
Description
Gets the current output image width for the specified channel.
Syntax
sensor.width(chn=CAM_CHN_ID_0)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
chn |
Sensor output channel number |
Input |
Return Value
Return Value |
Description |
|---|---|
int |
Image width (pixels) |
Example
current_width = sensor.width(chn=CAM_CHN_ID_0)
print("Current width:", current_width)
sensor.height#
Description
Gets the current output image height for the specified channel.
Syntax
sensor.height(chn=CAM_CHN_ID_0)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
chn |
Sensor output channel number |
Input |
Return Value
Return Value |
Description |
|---|---|
int |
Image height (pixels) |
Example
current_height = sensor.height(chn=CAM_CHN_ID_0)
print("Current height:", current_height)
sensor.get_pixformat#
Description
Gets the current pixel format for the specified channel.
Syntax
sensor.get_pixformat(chn=CAM_CHN_ID_0)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
chn |
Sensor output channel number |
Input |
Return Value
Return Value |
Description |
|---|---|
int |
Pixel format enumeration value (e.g., |
Example
current_format = sensor.get_pixformat(chn=CAM_CHN_ID_0)
print("Current pixel format:", current_format)
sensor.get_type#
Description Gets the type identifier of the current sensor.
Syntax
sensor.get_type()
Return Value
Return Value |
Description |
|---|---|
int |
Sensor type enumeration value |
Example
sensor_type = sensor.get_type()
print("Sensor type:", sensor_type)
sensor.again#
Description
Gets or sets the analog gain value of the sensor.
Syntax
# Get gain
gain = sensor.again()
# Set gain (pass float value directly)
sensor.again(desired_gain)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
desired_gain |
Target gain value (used when setting), pass float type directly |
Input |
Return Value
Return Value |
Description |
|---|---|
k_sensor_gain |
Current gain object (returned when getting), access the gain value via |
bool |
Setting returns |
Notes
Only supported by some sensors, e.g.,
sc132gsWhen setting gain, ensure the sensor has been initialized and is in a running state
It is recommended to call
get_again_range()first to obtain the gain range
Example
# Get current gain
current_gain = sensor.again()
print("Current gain:", current_gain.gain[0])
# Set gain to 4.0
sensor.again(4.0)
sensor.auto_focus#
Description
Gets or sets the enable status of the auto-focus function.
Syntax
Sensor.auto_focus(enable = None)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
enable |
Enable status of auto-focus function (used when setting) |
Input |
Return Value
Return Value |
Description |
|---|---|
bool |
Returns the current status when getting: |
Example
# Get auto-focus status
auto_focus_get = sensor.auto_focus()
print("sensor.auto_focus():", auto_focus_get)
# Set auto-focus
sensor.auto_focus(True)
Notes
Only supported by some sensors.
The auto-focus function needs to be set before running.
sensor.focus_caps#
Description
Gets the auto-focus function and its range of the sensor.
Syntax
focus_caps_tuple = Sensor.focus_caps()
Parameters
None
Return Value
Return Value |
Description |
|---|---|
focus_caps_tuple |
Tuple containing auto-focus function and its range: |
Example
# Get auto-focus function and its range
focus_caps_tuple = sensor.focus_caps()
print("focus_caps_tuple:", focus_caps_tuple)
sensor.focus_pos#
Description
Gets or sets the current focus position of the sensor.
Syntax
focus_pos = sensor.focus_pos(pos = None)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
pos |
Focus position (used when setting) |
Input |
Return Value
Return Value |
Description |
|---|---|
focus_pos |
Returns the current focus position when getting; |
Example
# Get current focus position
current_focus_pos = sensor.focus_pos()
print("Current focus position:", current_focus_pos)
# Set focus position
sensor.focus_pos(300)
sensor.get_exposure_time_range#
Description
Gets the exposure time range supported by the sensor.
Syntax
sensor.get_exposure_time_range()
Parameters
None
Return Value
Return Value |
Description |
|---|---|
|
|
|
If the retrieval fails |
Example
from media.sensor import Sensor
sensor = Sensor()
sensor.reset()
# Get exposure range
range = sensor.get_exposure_time_range()
if range:
max_exp, min_exp = range
print(f"Exposure range: {min_exp:.2f} us - {max_exp:.2f} us")
print(f" ({min_exp/1000:.2f} ms - {max_exp/1000:.2f} ms)")
Notes
The return value is in microseconds (us)
Different sensors support different exposure ranges
It is recommended to obtain the range before setting the exposure
Must be called after
sensor.run()
sensor.auto_exposure#
Description
Toggles auto-exposure or gets the current auto-exposure status.
Syntax
# Get current status
status = sensor.auto_exposure()
# Set status
sensor.auto_exposure(enable)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
enable |
|
Input |
Return Value
Return Value |
Description |
|---|---|
|
Current auto-exposure status (returns |
Exception
RuntimeError: If the sensor is not initialized
Example
from media.sensor import Sensor
sensor = Sensor()
sensor.reset()
# Get current auto-exposure status
status = sensor.auto_exposure()
print(f"Auto-exposure: {'Enabled' if status else 'Disabled'}")
# Disable auto-exposure (manual mode) - must be before run()!
sensor.auto_exposure(False)
# Set manual exposure time
sensor.exposure(10000) # 10ms
# Start the sensor
sensor.run()
Notes
Must be called before
sensor.run()Manual exposure time can only be set after disabling auto-exposure
Currently, dynamic toggling of auto-exposure after
sensor.run()is not supported
sensor.exposure#
Description
Gets or sets the sensor exposure time.
Syntax
# Get current exposure time
current = sensor.exposure()
# Set exposure time
sensor.exposure(exposure_us)
Parameters
Parameter |
Description |
Input/Output |
|---|---|---|
exposure_us |
Exposure time, in microseconds (us) |
Input |
Return Value
Return Value |
Description |
|---|---|
|
Current exposure time (microseconds) |
|
If failed |
Exception
RuntimeError: If the sensor fd is invalid
Example
from media.sensor import Sensor
sensor = Sensor()
sensor.reset()
# Disable auto-exposure (must be before run)
sensor.auto_exposure(False)
# Start the sensor
sensor.run()
# Get current exposure time
current = sensor.exposure()
print(f"Current exposure: {current:.2f} us")
# Set exposure time to 10ms
sensor.exposure(10000)
# Use in combination with exposure range
range = sensor.get_exposure_time_range()
if range:
max_exp, min_exp = range
# Set to middle value
mid_exp = (max_exp + min_exp) / 2
sensor.exposure(mid_exp)
print(f"Set exposure: {mid_exp:.2f} us")
Notes
Must be called after
sensor.run()Units are uniformly in microseconds (us)
The underlying layer automatically performs second↔microsecond conversions
It is recommended to disable auto-exposure before manual setting
The set value should be within the range returned by
get_exposure_time_range()
Complete Example#
from media.sensor import Sensor
# Initialize the sensor
sensor = Sensor()
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.FHD)
# Get exposure range (cannot be called before run)
# range = sensor.get_exposure_time_range() # Error!
# Disable auto-exposure (must be before run)
sensor.auto_exposure(False)
# Start the sensor
sensor.run()
# Now you can call get_exposure_time_range and exposure
range = sensor.get_exposure_time_range()
if range:
max_exp, min_exp = range
print(f"Exposure range: {min_exp:.2f} us - {max_exp:.2f} us")
# Set to middle exposure value
mid_exp = (max_exp + min_exp) / 2
sensor.exposure(mid_exp)
print(f"Set exposure: {mid_exp:.2f} us")
# Adjust exposure during runtime
frame_count = 0
while True:
img = sensor.snapshot()
# Adjust exposure every 100 frames
if frame_count % 100 == 0:
current = sensor.exposure()
print(f"Current exposure: {current:.2f} us")
frame_count += 1
Data Structure Description#
frame_size#
Image Frame Size |
Resolution |
|---|---|
QQCIF |
88x72 |
QCIF |
176x144 |
CIF |
352x288 |
QSIF |
176x120 |
SIF |
352x240 |
QQVGA |
160x120 |
QVGA |
320x240 |
VGA |
640x480 |
HQQVGA |
120x80 |
HQVGA |
240x160 |
HVGA |
480x320 |
B64X64 |
64x64 |
B128X64 |
128x64 |
B128X128 |
128x128 |
B160X160 |
160x160 |
B320X320 |
320x320 |
QQVGA2 |
128x160 |
WVGA |
720x480 |
WVGA2 |
752x480 |
SVGA |
800x600 |
XGA |
1024x768 |
WXGA |
1280x768 |
SXGA |
1280x1024 |
SXGAM |
1280x960 |
UXGA |
1600x1200 |
HD |
1280x720 |
FHD |
1920x1080 |
QHD |
2560x1440 |
QXGA |
2048x1536 |
WQXGA |
2560x1600 |
WQXGA2 |
2592x1944 |
pixel_format#
Pixel Format |
Description |
|---|---|
RGB565 |
16-bit RGB format |
RGB888 |
24-bit RGB format |
RGBP888 |
Separated 24-bit RGB |
YUV420SP |
Semi-planar YUV |
GRAYSCALE |
Grayscale image |
channel#
Channel Number |
Description |
|---|---|
CAM_CHN_ID_0 |
Channel 0 |
CAM_CHN_ID_1 |
Channel 1 |
CAM_CHN_ID_2 |
Channel 2 |
CAM_CHN_ID_MAX |
Invalid Channel |
Image Sensor Support List#
Image Sensor Model |
Resolution |
Frame Rate |
|---|---|---|
OV5647 |
2592x1944 |
10 FPS |
1920x1080 |
30 FPS |
|
1280x960 |
45 FPS |
|
1280x720 |
60 FPS |
|
640x480 |
90 FPS |
|
GC2093 |
1920x1080 |
30 FPS |
1920x1080 |
60 FPS |
|
1280x960 |
60 FPS |
|
1280x720 |
90 FPS |
|
IMX335 |
1920x1080 |
30 FPS |
2592x1944 |
30 FPS |
sensor.get_again_range#
Description
Get the configurable range of the sensor’s analog gain (Again).
Syntax
sensor.get_again_range()
Parameters
None
Return Value
Return Value |
Description |
|---|---|
|
A dictionary containing gain range information: |
|
If retrieval fails |
Notes
Only supported by some sensors
Must be called after
sensor.run()It is recommended to retrieve the range before setting the gain
Example
from media.sensor import Sensor
sensor = Sensor()
sensor.reset()
sensor.run()
# Get gain range
gain_range = sensor.get_again_range()
if gain_range:
min_gain = gain_range['min']
max_gain = gain_range['max']
step = gain_range['step']
print(f"增益范围:{min_gain:.2f} - {max_gain:.2f}")
print(f"步进值:{step:.6f}")
# Set gain to middle value
mid_gain = (min_gain + max_gain) / 2
sensor.again(mid_gain)
Sensor.list_mode#
Description
List all resolution and FPS combinations supported by the specified sensor. This is a static method and can be called without initializing the sensor.
Syntax
Sensor.list_mode(id=None)
Parameters
Parameter Name |
Description |
Input/Output |
|---|---|---|
id |
CSI bus number (0-2), defaults to the default sensor |
Input |
Return Value
Return Value |
Description |
|---|---|
|
|
Notes
Static method, use
Sensor.list_mode()instead ofsensor.list_mode()No need to initialize the sensor; can be called before
Sensor()Different sensors support different modes
Example
from media.sensor import Sensor
# Call before sensor initialization
sensor_name, modes = Sensor.list_mode(id=2)
print(f"传感器:{sensor_name}")
if modes:
print(f"共支持 {len(modes)} 种模式:")
for i, mode in enumerate(modes):
print(f"{i}: {mode['width']}x{mode['height']}@{mode['fps']}fps")
# Select an appropriate resolution based on the mode list
if modes:
# Select 1080P30 mode
for mode in modes:
if mode['width'] == 1920 and mode['height'] == 1080 and mode['fps'] == 30:
print("找到 1080P30 模式")
break
# Then initialize the sensor
sensor = Sensor(id=2)
sensor.reset()
sensor.set_framesize(width=1920, height=1080)
Output Example
Sensor Mode List (CSI 2, gc2093_csi2):
---------------------------------------------
Index Resolution FPS
---------------------------------------------
0 1920x1080 30
1 1280x720 60
2 640x480 90
---------------------------------------------
Total: 3 modes
传感器:gc2093_csi2
共支持 3 种模式:
0: 1920x1080@30fps
1: 1280x720@60fps
2: 640x480@90fps